
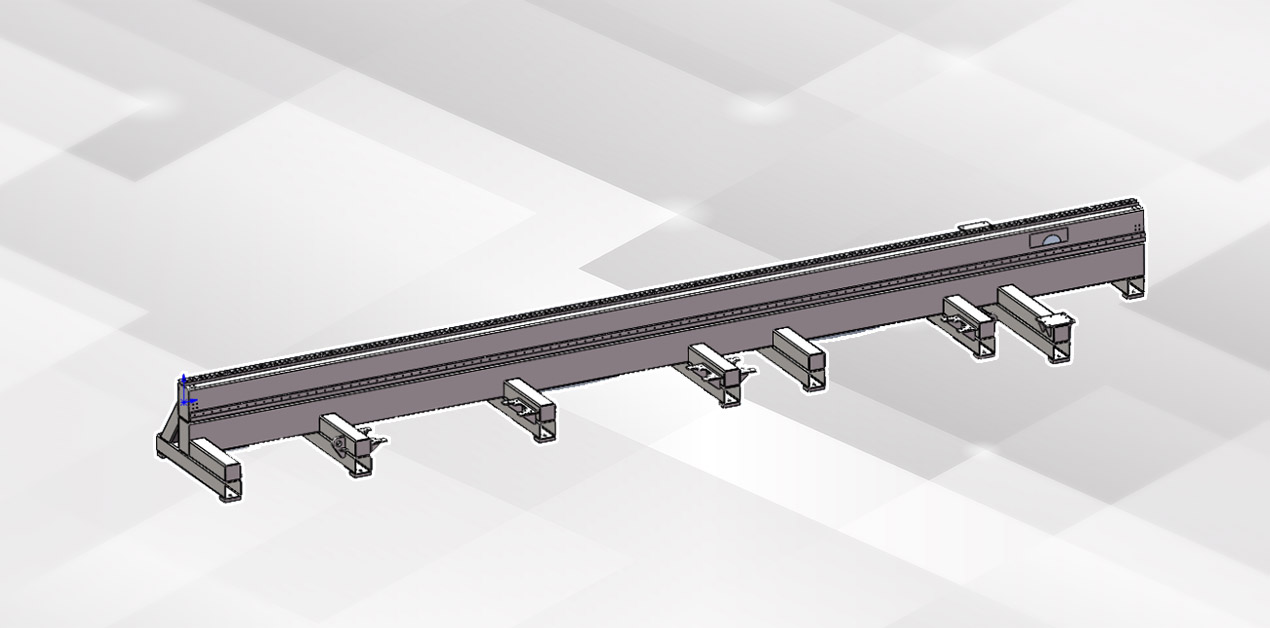
ክፍሎች ጎን-የተንጠለጠለ-መዋቅር-አንድ-ክፍል-የተገጣጠመ-አልጋ
ጎን-የተንጠለጠለ-መዋቅር-አንድ-ክፍል-የተገጣጠመ-አልጋ አልጋው የጎን ተንጠልጥሎ የተሰራ መዋቅር እና አንድ ቁራጭ የተሰፋ አልጋን ይጠቀማል፣ ይህም ውስጣዊ ውጥረትን ለማስወገድ የተገጠመ ነው። ከሻካራ ማሽነሪ በኋላ፣ ማሽነሪውን ከማጠናቀቅዎ በፊት የንዝረት እርጅና ይከናወናል፣ በዚህም የማሽኑን መሳሪያ ጥንካሬ እና መረጋጋት በእጅጉ ያሻሽላል እና የማሽኑን መሳሪያ ትክክለኛነት ያረጋግጣል። የኤሲ ሰርቮ ሞተር ድራይቭ በቁጥር ቁጥጥር ስርዓት ቁጥጥር ይደረግበታል፣ እና ቹክ ከሞተር ድራይቭ በኋላ በY አቅጣጫ የሚለዋወጥ እንቅስቃሴን ይገነዘባል፣ ፈጣን እንቅስቃሴን እና የመመገቢያ እንቅስቃሴን ይገነዘባል። ሁለቱም የY-axis መደርደሪያ እና መስመራዊ መመሪያ ሀዲድ ከፍተኛ ትክክለኛነት ካላቸው ምርቶች የተሠሩ ናቸው፣ ይህም የስርጭቱን ትክክለኛነት በብቃት ያረጋግጣል፤ በሁለቱም የስትሮክ ጫፎች ላይ ያሉት የገደብ መቀየሪያዎች ቁጥጥር ይደረግባቸዋል፣ እና በተመሳሳይ ጊዜ ጠንካራ ገደብ መሳሪያ ተጭኗል፣ ይህም የማሽኑን መሳሪያ እንቅስቃሴ ደህንነት በብቃት ያረጋግጣል፤ የማሽኑ መሳሪያ የተገጠመለት ነው። አውቶማቲክ ቅባት መሳሪያው የሚንቀሳቀሱት ክፍሎች በጥሩ ሁኔታ እንዲሰሩ ለማረጋገጥ በየጊዜው በአልጋው ላይ በሚንቀሳቀሱ ክፍሎች ላይ ቅባት ዘይት ይጨምራል፣ ይህም የመሪ ሀዲዶችን፣ ማርሾችን እና መደርደሪያዎችን የአገልግሎት ዘመን ሊያሻሽል ይችላል።
በአልጋው ላይ የተገጠሙ ሁለት የድጋፍ ዘዴዎች አሉ፣ እና ሁለት ዓይነቶች አሉ፡ 1. የክትትል ድጋፉ ወደ ላይ እና ወደ ታች ለመንቀሳቀስ በገለልተኛ ሰርቮ ሞተር ቁጥጥር ይደረግበታል፣ በዋናነት ረጅም የተቆረጡ ቧንቧዎችን ከመጠን በላይ መበላሸት (ትናንሽ ዲያሜትሮች ያላቸው ቧንቧዎች) የክትትል ድጋፍ ለማከናወን። የኋላ ቋጠሮው ወደ ተጓዳኝ ቦታ ሲንቀሳቀስ፣ ረዳት ድጋፉ ለማስወገድ ዝቅ ሊደረግ ይችላል። 2. ተለዋዋጭ ዲያሜትር ያለው የዊል ድጋፍ በሲሊንደር ተነስቶ ዝቅ ይላል፣ እና የተለያዩ መጠኖች ያላቸውን ቧንቧዎች ለመደገፍ በተለያዩ የመለኪያ ቦታዎች በእጅ ሊስተካከል ይችላል።
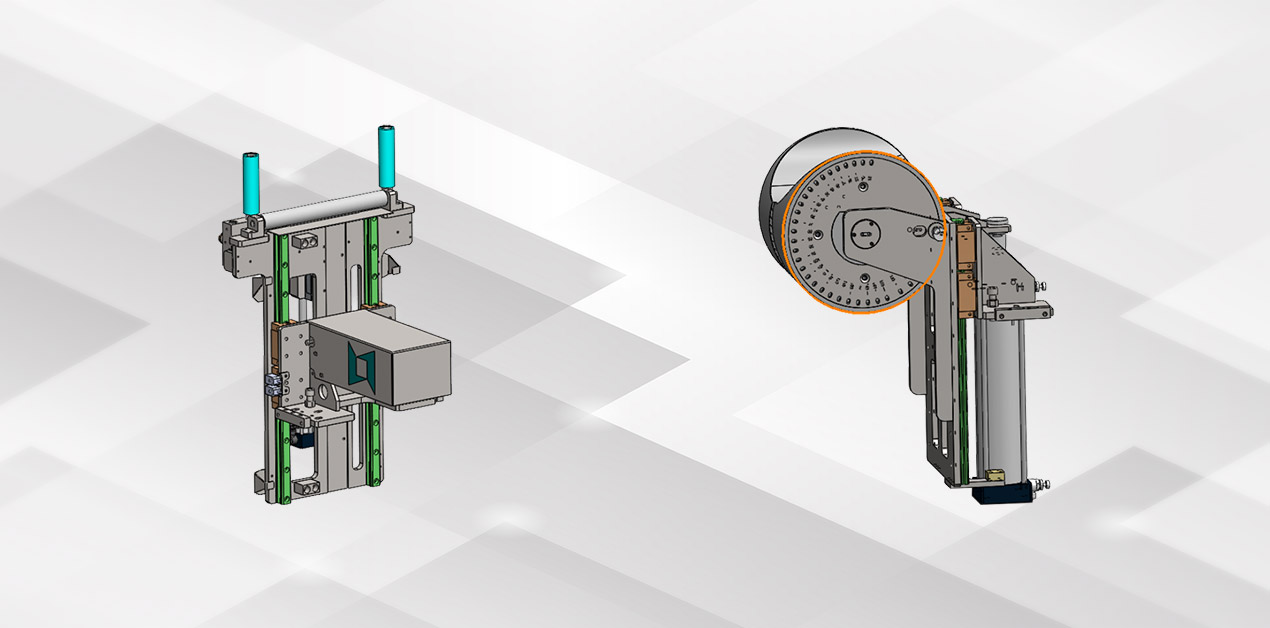
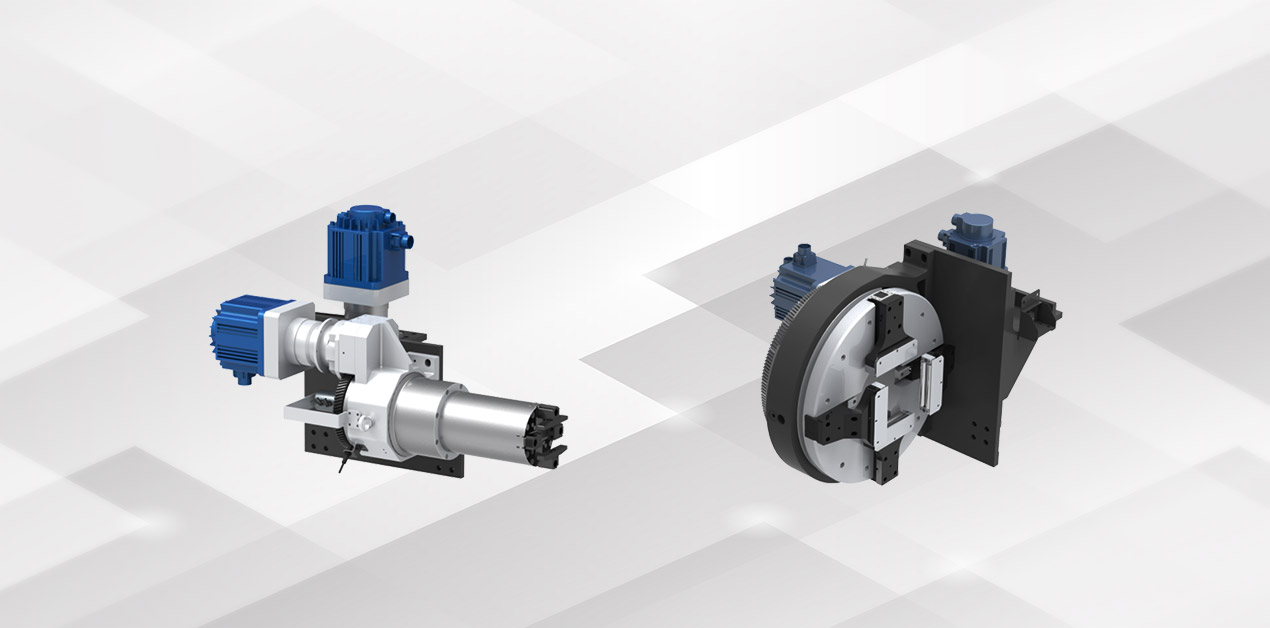
ቹኩ ከፊትና ከኋላ ሁለት የአየር ግፊት ቹኮች የተከፈለ ሲሆን ሁለቱም በY አቅጣጫ ሊንቀሳቀሱ ይችላሉ። የኋላ ቹኩ ቧንቧውን ለመቆለፍ እና ለመመገብ ኃላፊነት አለበት፣ እና የፊት ቹኩ ለመቆለፍ ቁሳቁሶች በአልጋው መጨረሻ ላይ ተጭኗል። የፊት እና የኋላ ቹኩቹ በቅደም ተከተል በሰርቮ ሞተሮች የሚነዱ ሲሆን ይህም ተመሳሳይ ሽክርክሪት እንዲያገኙ ያደርጋል። በድርብ ቹኮች መገጣጠሚያ መቆለፊያ ስር አጭር ጅራት መቁረጥ ሊከናወን ይችላል፣ እና የአፉ አጭር ጅራት ከ20-40 ሚሜ ሊደርስ ይችላል፣ ይህም ረጅም ጅራት አጭር ጅራት መቆረጥን ይደግፋል። የTN ተከታታይ የቧንቧ መቁረጫ ማሽን የቹክ እንቅስቃሴ እና የማስወገድ ዘዴን ይጠቀማል፣ ይህም መቆራረጡን ሁልጊዜ በሁለት ቹኮች ማከናወን ይችላል፣ እና ቧንቧው በጣም ረጅም እና ያልተረጋጋ እንዲሆን አያደርግም፣ እና ትክክለኛነት በቂ አይደለም።
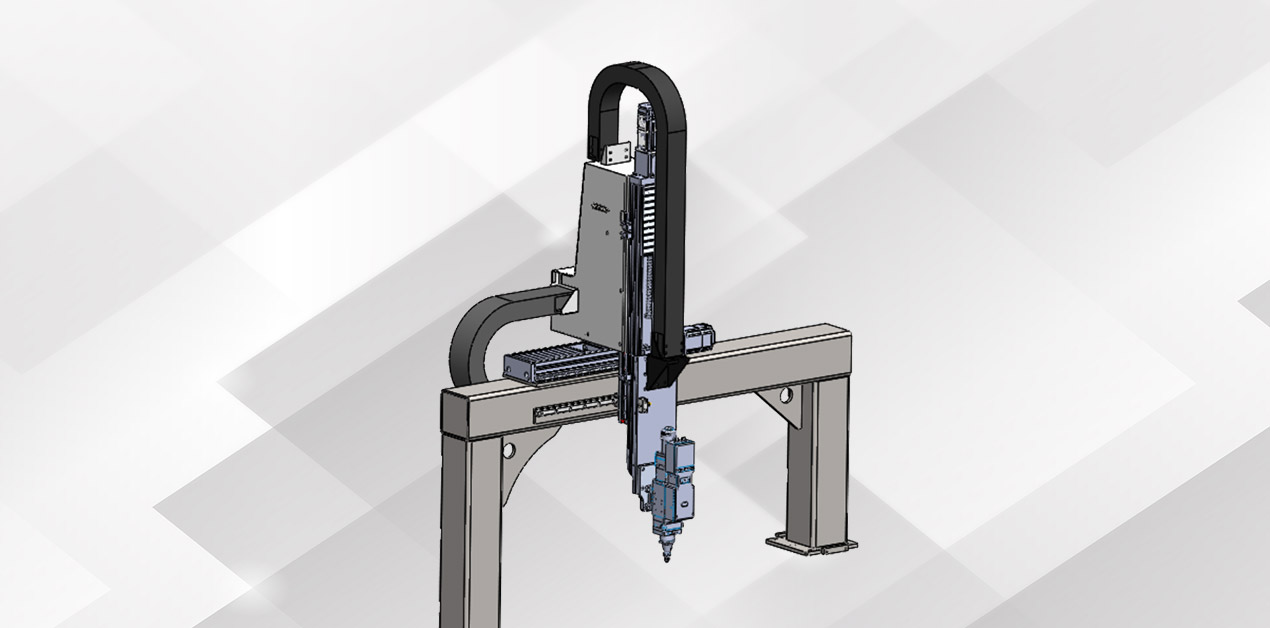
የኤክስ-ዘንግ መሳሪያው የመስቀል ቅርጽ ያለው የጋንትሪ መዋቅርን ይቀበላል፣ ይህም በካሬ ቱቦ እና በብረት ሳህን ጥምረት የተገጣጠመ ነው። የጋንትሪ ክፍሉ በአልጋው ላይ ተስተካክሏል፣ እና የኤክስ-ዘንግ በሰርቮ ሞተር የሚነዳ ሲሆን የስላይድ ሳህኑን በኤክስ አቅጣጫ የሚለዋወጥ እንቅስቃሴ እውን ለማድረግ መደርደሪያውን እና ፒኑን ለማሽከርከር ይንቀሳቀሳል። በእንቅስቃሴ ሂደት ውስጥ፣ የገደብ ማብሪያ / ማጥፊያው የስርዓት አሠራሩን ደህንነት ለማረጋገጥ ቦታውን ለመገደብ ስትሮክን ይቆጣጠራል። በተመሳሳይ ጊዜ፣ የኤክስ/ዜድ ዘንግ ውስጣዊ መዋቅሩን ለመጠበቅ እና የተሻለ ጥበቃ እና የአቧራ ማስወገጃ ውጤቶችን ለማግኘት የራሱ የሆነ የአካል ክፍል ሽፋን አለው። የኤክስ/ዜድ ዘንግ መሳሪያው በዋናነት የሌዘር ጭንቅላትን ወደላይ እና ወደታች እንቅስቃሴን ይገነዘባል። የኤክስ-ዘንግ የራሱን የመሃል መተላለፊያ እንቅስቃሴ ለማከናወን እንደ CNC ዘንግ ሊያገለግል ይችላል፣ እና በተመሳሳይ ጊዜ ከኤክስ እና ዋይ ዘንግ ጋር ሊገናኝ ይችላል፣ እና የተለያዩ ሁኔታዎችን ፍላጎቶች ለማሟላት ወደ ተከታይ መቆጣጠሪያ ሊቀየር ይችላል።